n-Body Problem in zwei (räumlichen) Dimensionen
Ich wollte als Vorbereitung eines neuen Projektes im Dunstkreis computergenerierter "Kunst" die Simulation von Körpern in einem Gravitationsfeld simulieren.
Ich habe vor geraumer Zeit bereits einmal einen Spezialfall des 3-Körper-Problems implementiert und analysiert.
Nachdem ich neulich die Worley-Noise Funktion implementiert habe, habe ich überlegt, wie die Visualisierung dieser Funktion aussähe, wenn ich die Stützstellen als massebehaftete Körper betrachtete und die Bewegung im resultierenden (zweidimensionalen) Schwerefeld simulieren würde.
Dazu benötigte ich zunächst ein entsprechendes Differentialgleichungssystem, das ich dann mit meinen numerischen Lösungsverfahren iterieren kann.
Ich schreibe dieses Mal bewusst nicht die entsprechenden Formeln auf - die lassen sich leicht im Internet finden. Ich präsentiere hier lediglich den Schritt des numerischen Verfahrens, der aus den Zuständen des vorhergehenden Iterationsschritts die Zustandsänderung des aktuellen Iterationsschritts berechnet:
public double[] calculateDerivatives(double[] states)
{
if(states.length/4!=masses.length)
throw new java.lang.IllegalArgumentException("number of states and number of masses must match!");
double[] rv=new double[states.length];
for(int i=0;i<masses.length;++i)
{
double forcex=0;
double forcey=0;
double vx=states[i*4];
double sx=states[i*4+1];
double vy=states[i*4+2];
double sy=states[i*4+3];
for(int j=0;j< masses.length;++j)
{
if(j!=i)
{
double xdist=sx-states[j*4+1];
double ydist=sy-states[j*4+3];
double distance=java.lang.Math.sqrt(xdist*xdist+ydist*ydist);
forcex-=masses[j]*xdist/distance;
forcey-=masses[j]*ydist/distance;
}
}
double vxpunkt = forcex;
double sxpunkt=vx;
double vypunkt = forcey;
double sypunkt=vy;
rv[i*4+0] = vxpunkt;
rv[i*4+1] = sxpunkt;
rv[i*4+2] = vypunkt;
rv[i*4+3] = sypunkt;
}
return rv;
}
Mein erster Versuch war bereits vielversprechend: Mit 4 Körpern ergeben sich daraus 16 gekoppelte Differentialgleichungen, die ich mittels des Runge-Kutta-Fehlberg-Solvers behandelte. Die vier Körper hatten eine identische Masse und unterschiedliche Startpositionen, die Geschwindigkeitskomponenten zum Zeitpunkt t=0 waren allesamt 0 - lediglich einer der Körper hatte eine Geschwindigkeitskomponente in y-Richtung mit dem Betrag 3. Die Entwicklung der Positionen der vier Körper kann man in den folgenden Abbildungen betrachten - der einzige Unterschied in den Anfangszuständen ist das Vorzeichen der Geschwindigkeitskomponente mit Betrag 3:
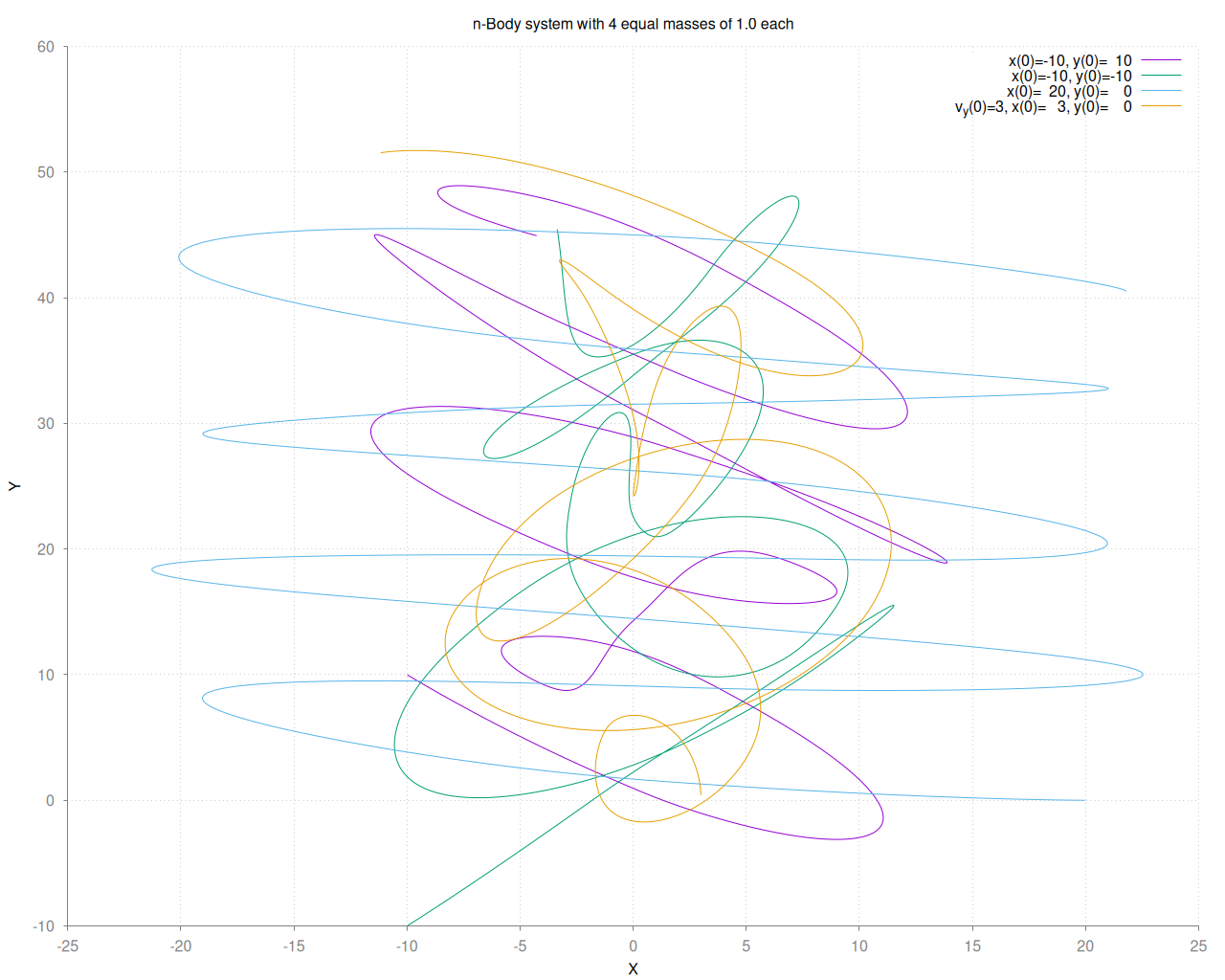 Entwicklung des Systems mit Startgeschwindigkeit +3
Entwicklung des Systems mit Startgeschwindigkeit +3
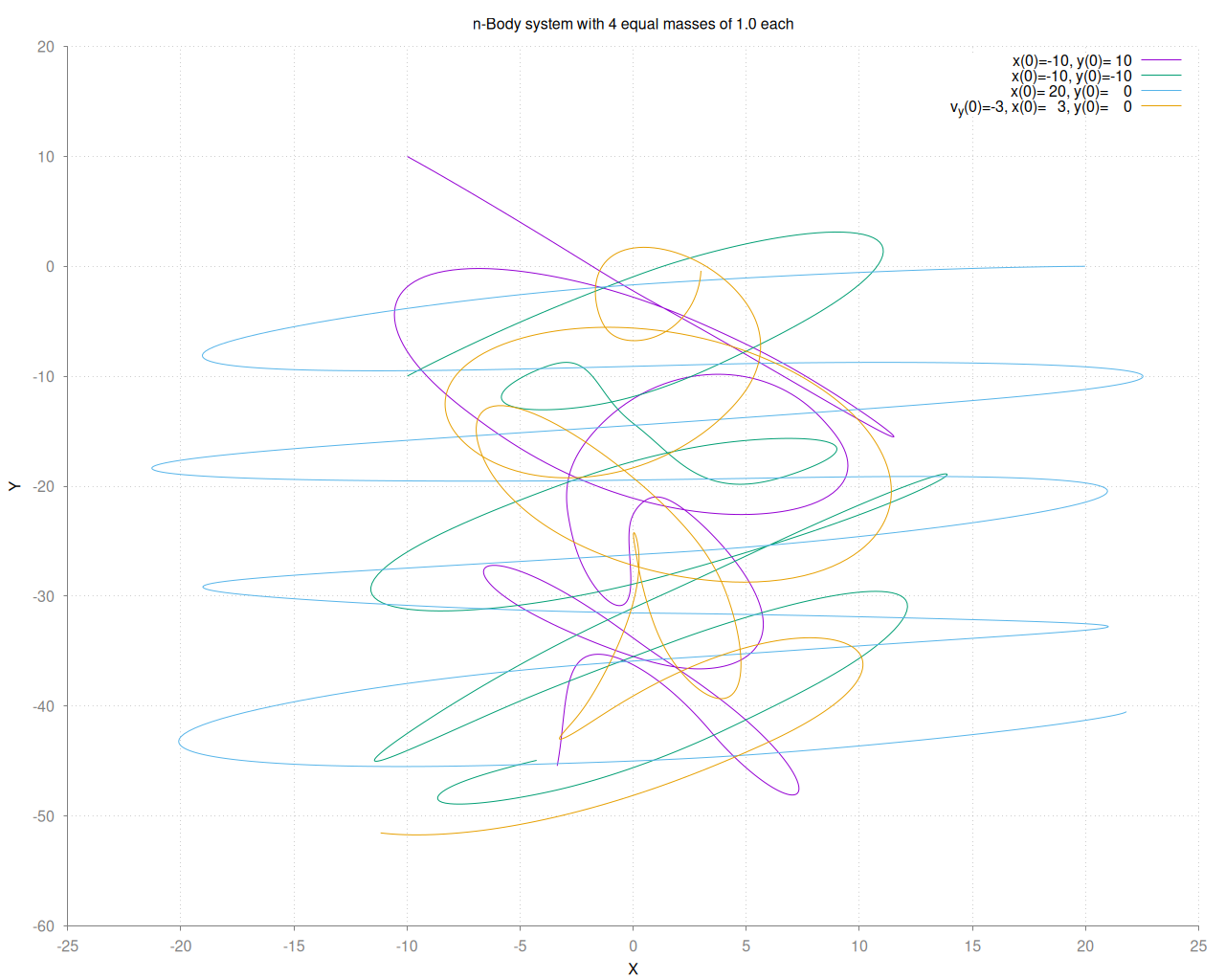 Entwicklung des Systems mit Startgeschwindigkeit -3
Entwicklung des Systems mit Startgeschwindigkeit -3




![]()
![]()


![]()
Vor 5 Jahren hier im Blog
-
GeoJSON in EBMap4D
31.07.2021
Ich habe die Anwendung EBMap4D einer Generalüberholung unterzogen und neue Features hinzugefügt...
Weiterlesen
Tags
AI und ML Android Basteln C und C++ Chaos Datenbanken Docker dWb+ ESP Wifi Garten Geo Go GUI Hardware Java Jupyter JupyterBinder Komponenten Links Linux Markdown Markup Music Numerik OpenSource PKI-X.509-CA Präsentationen Python QBrowser Rants Raspi Revisited Security Software-Test sQLshell TeleGrafana Verschiedenes Video Virtualisierung Windows Upcoming...
Neueste Artikel
-
Automatische Konvertierung von JavaScript nach Java
Ich halte mich von den Themen Artificial Intelligence und Machine Learning (Large Language Models) ja fern so gut es geht - vor allem, weil ich das mal studiert habe. Manchmal überkommt mich aber die Neugierde - das Resultat war bisher immer schlechte Laune.
Weiterlesen -
OCR Workflow in der sQLshell
Wie bereits in einem früheren Artikel beschrieben habe verfügt die sQLshell über eine Integration zur Erfassung von Daten aus Dokumentendirekt per Optical Character Recognition. Ich habe diese Integration weiter verfeinert und möchte hier einen exemplarischen Workflow für diese Möglichkeit zeigen
Weiterlesen -
Docker-Services im Homelab
Diese Seite wird mit allen derzeit in meinem Self-Hosting Homelab betriebenen Services auf Docker-Basis befüllt (Eigenentwicklungen werden nicht genannt, sofern sie keine öffentlich verfügbaren Open-Source-Lösungen darstellen).
Weiterlesen
Manche nennen es Blog, manche Web-Seite - ich schreibe hier hin und wieder über meine Erlebnisse, Rückschläge und Erleuchtungen bei meinen Hobbies.
Wer daran teilhaben und eventuell sogar davon profitieren möchte, muss damit leben, daß ich hin und wieder kleine Ausflüge in Bereiche mache, die nichts mit IT, Administration oder Softwareentwicklung zu tun haben.
Ich wünsche allen Lesern viel Spaß und hin und wieder einen kleinen AHA!-Effekt...
PS: Meine öffentlichen Codeberg-Repositories findet man hier.