Updates
Nachdem ich so viel Spaß bei der Untersuchung der Behandlung eines chaotischen Systems mittels impliziten Eulerverfahrens hatte, habe ich mir gleich noch eines vorgenommen...
Der Rössler-Attractor stellt sich wie folgt dar:
 mit
mit
 Daraus folgt für die Behandlung mit dem impliziten Eulerverfahren und einer Schrittweite (oder Intervallänge) h:
Daraus folgt für die Behandlung mit dem impliziten Eulerverfahren und einer Schrittweite (oder Intervallänge) h:
 und eingesetzt:
und eingesetzt:
 Und wegen der Übersichtlichkeit:
Und wegen der Übersichtlichkeit:
 Löst man dieses Gleichungssystem - und ich gebe zu, dass ich mich außerstande sah und Hilfe bei
SymPy
gesucht habe - kommt man auf ein Ergebnis für die Berechnung der drei Zustandsgrößen, das auf der Konsole - direkt von
SymPy - wie folgt aussieht:
Löst man dieses Gleichungssystem - und ich gebe zu, dass ich mich außerstande sah und Hilfe bei
SymPy
gesucht habe - kommt man auf ein Ergebnis für die Berechnung der drei Zustandsgrößen, das auf der Konsole - direkt von
SymPy - wie folgt aussieht:
from sympy import *
>>> from sympy import *
>>> x, y, z,a,b,c,d,e,f,h = symbols('x, y, z,a,b,c,d,e,f,h')
>>> linsolve([a-h*y-h*z-x,b+h*x+c*y-y,d+e+h*z*x-f*z-z],(x,y,z))
{((h*(c - 1)*(h**2*z*(a*h + b) - (-c + h**2 + 1)*(a*h*z + d + e)) +
(a*(-c + h**2 + 1) - h*(a*h + b))*(h**4*z -
(-c + h**2 + 1)*(f + h**2*z - h*x + 1)))/((h**4*z -
(-c + h**2 + 1)*(f + h**2*z - h*x + 1))*(-c + h**2 + 1)),
(a*f*h - a*h**2*x + a*h + b*f + b*h**2*z - b*h*x + b -
d*h**2 - e*h**2)/(-c*f - c*h**2*z + c*h*x - c + f*h**2 + f -
h**3*x + h**2*z + h**2 - h*x + 1), (h**2*z*(a*h + b) -
(-c + h**2 + 1)*(a*h*z + d + e))/(h**4*z -
(-c + h**2 + 1)*(f + h**2*z - h*x + 1)))}
>>>
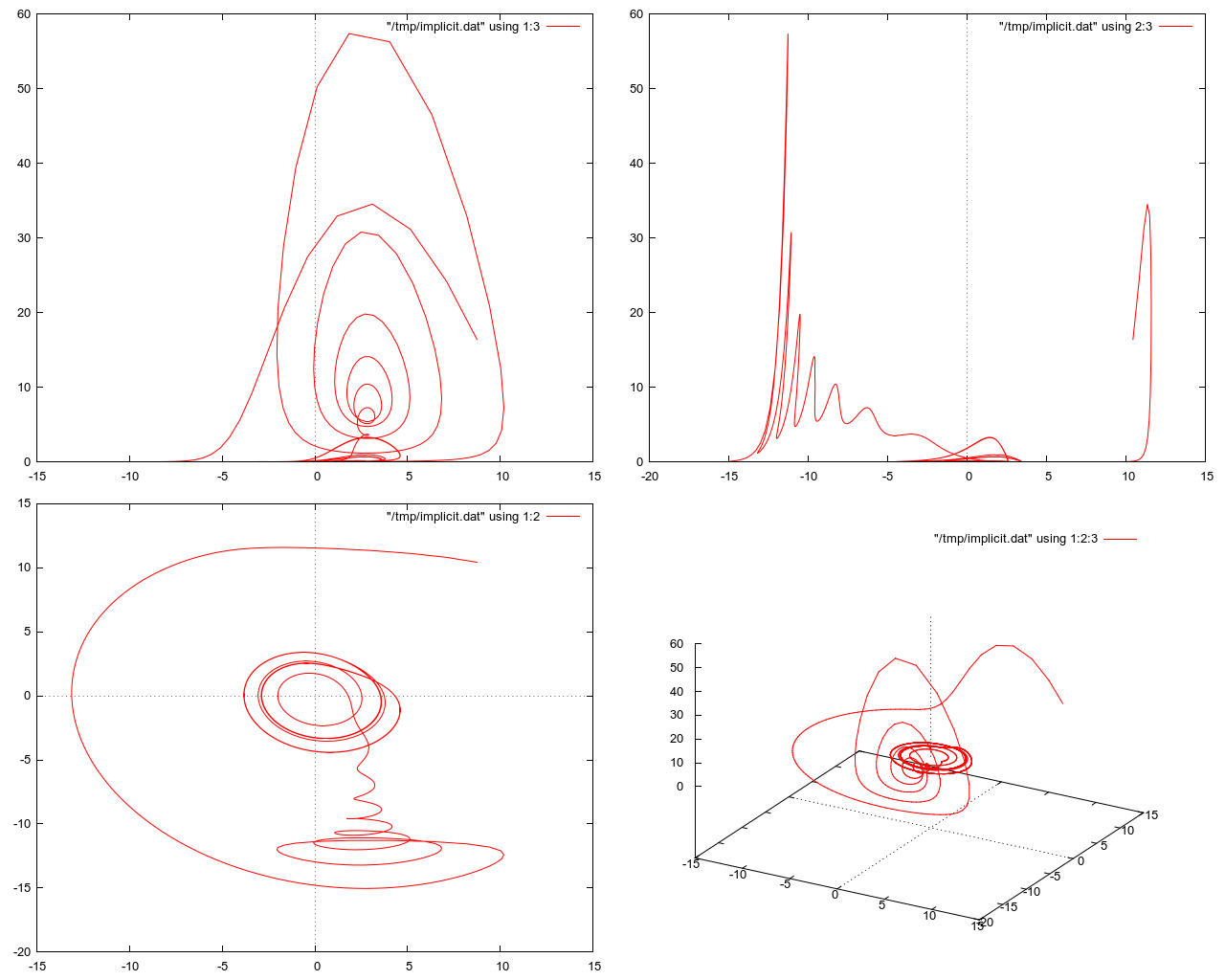
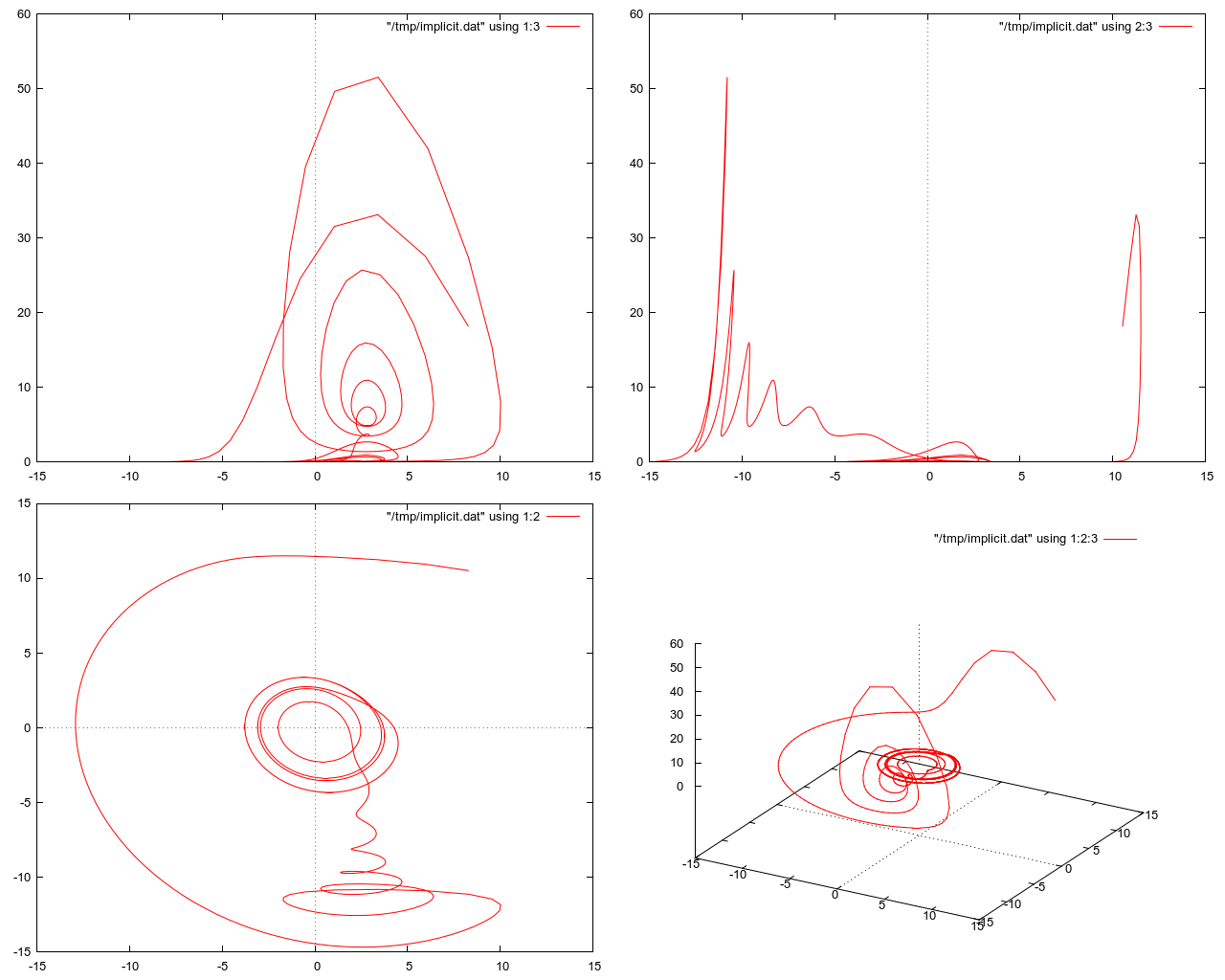
Eindrucksvoll und dennoch verwirrend - daher habe ich es hier nochmal aufbereitet:

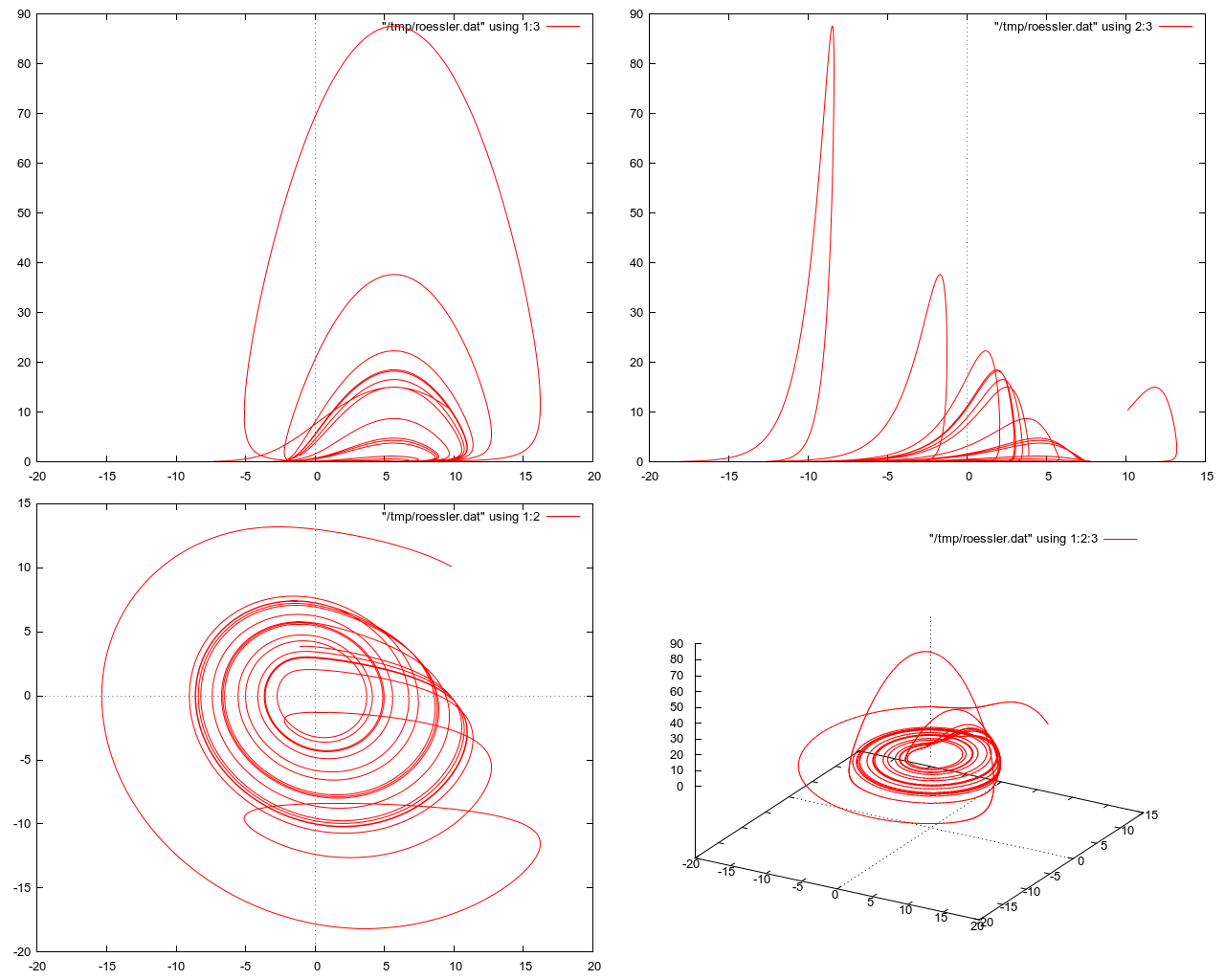
Die hier gezeigten Darstellung veranschaulichen den Vorteil des impliziten Eulerverfahrens noch einmal schön: Als Referenz habe ich den Rösslerattractor mit einem adaptiven, expliziten Cash-Karp-Solver bis zu t=100 berechnet. Das benötigte 10000 Schritte - damit war die optimale durchschnittliche Schrittweite mit h=0.03 ermittelt.
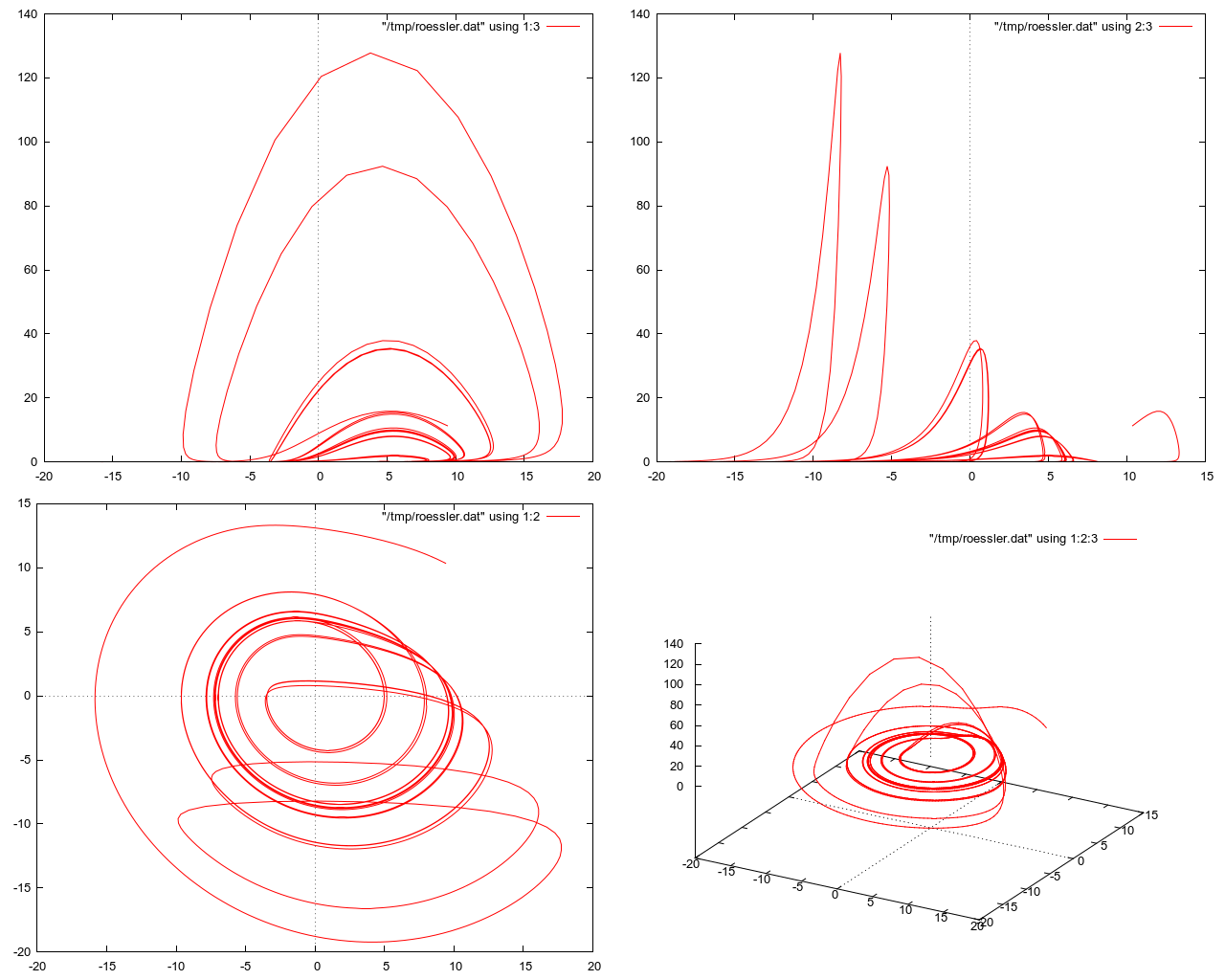
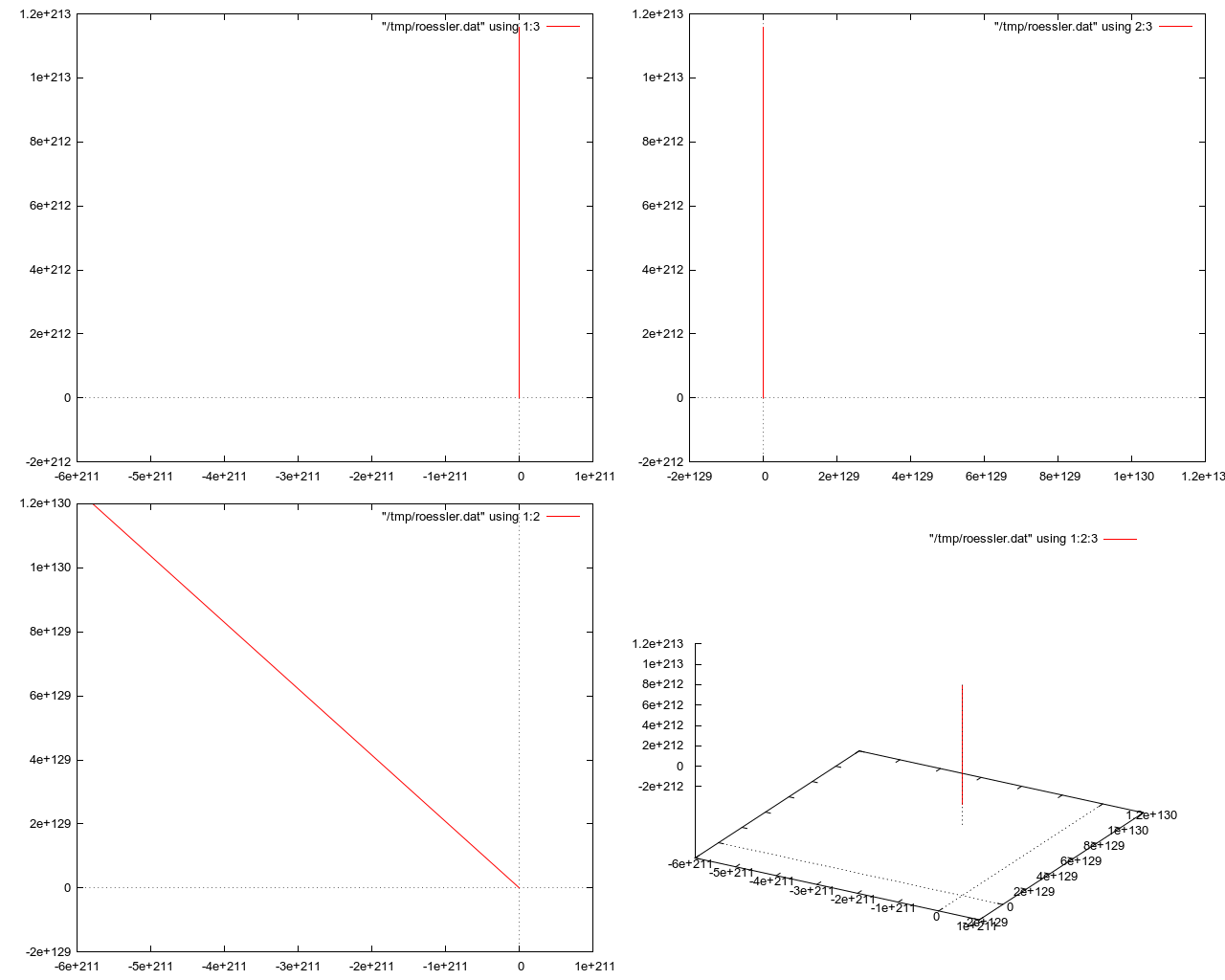
Daraufhin berechnete ich zunächst das System mit dem expliziten Eulerverfahren und unterschiedlichen Schrittweiten bis zu t=30. Die Darstellungen zeigen die Änderungen im Ergebnis für h= 0.03, h=0.04 und h=0.05. Man kann erkennen, dass bereits bei h=0.04 eine Degeneration einsetzt (die Spiralfeder) und schließlich bei h=0.05 schließlich keine Lösung mehr ermittelt werden kann.
Die beiden letzten Bild stellen das Ergebnis des impliziten Verfahrens mit einer Schrittweite von h=0.04 und h=0.05 dar - in beiden sieht man, dass die beim expliziten Verfahren mit h=0.04 beobachtete Degeneration auch hier vorliegt, allerdings wird auch deutlich, dass die Lösung qualitativ noch sehr nahe am Original liegt. Damit ist einmal mehr bewiesen, dass man sich für die numerische Lösung von Differentialgleichungssystemen der Mühe unterziehen sollte, das implizite Eulerverfahren zumindest in Betracht zu ziehen.
Aktualisierung vom 26. Februar 2020
Screenshots

Artikel, die hierher verlinken
Synchronisierung von Roessler-Systemen
03.11.2020
Nachdem ich ein wenig mit der Synchronisation von Lorenz-Systemen herumgespielt habe wollte ich herausfinden, ob sich die gefundenen Ergebnisse auf andere Systeme übertragen lassen - mein erster Kandidat dafür war das Roessler-System.
Bifurkationen im Lorenz-System
10.05.2020
Nachdem ich hier schon einmal kurz über Bifurkationen und Lyapunov-Exponenten berichtet habe, habe ich den Code dafür aufgeräumt und flexibilisiert - nun kann ich diese Werkzeuge auf beliebige Systeme anwenden: Das erste Beispiel war ja das Roessler-System, jetzt habe ich sie auf das Lorenz-System angewendet.
Mathematik mit beliebiger Präzision in Java
11.11.2018
Wann immer ich hier über Experimente mit numerischen Lösungsverfahren für Differentialgleichungssysteme berichte, habe ich im Hinterkopf, dass diese Verfahren eigentlich völlig ungeeignet dafür sind, solche Systeme zu analysieren, da heutige Digitalcomputer bereits rationale Zahlen nicht exakt darstellen können - von irrationalen ganz zu schweigen...




![]()
![]()


![]()
Vor 5 Jahren hier im Blog
-
GeoJSON in EBMap4D
31.07.2021
Ich habe die Anwendung EBMap4D einer Generalüberholung unterzogen und neue Features hinzugefügt...
Weiterlesen
Tags
AI und ML Android Basteln C und C++ Chaos Datenbanken Docker dWb+ ESP Wifi Garten Geo Go GUI Hardware Java Jupyter JupyterBinder Komponenten Links Linux Markdown Markup Music Numerik OpenSource PKI-X.509-CA Präsentationen Python QBrowser Rants Raspi Revisited Security Software-Test sQLshell TeleGrafana Verschiedenes Video Virtualisierung Windows Upcoming...
Neueste Artikel
-
Automatische Konvertierung von JavaScript nach Java
Ich halte mich von den Themen Artificial Intelligence und Machine Learning (Large Language Models) ja fern so gut es geht - vor allem, weil ich das mal studiert habe. Manchmal überkommt mich aber die Neugierde - das Resultat war bisher immer schlechte Laune.
Weiterlesen -
OCR Workflow in der sQLshell
Wie bereits in einem früheren Artikel beschrieben habe verfügt die sQLshell über eine Integration zur Erfassung von Daten aus Dokumentendirekt per Optical Character Recognition. Ich habe diese Integration weiter verfeinert und möchte hier einen exemplarischen Workflow für diese Möglichkeit zeigen
Weiterlesen -
Docker-Services im Homelab
Diese Seite wird mit allen derzeit in meinem Self-Hosting Homelab betriebenen Services auf Docker-Basis befüllt (Eigenentwicklungen werden nicht genannt, sofern sie keine öffentlich verfügbaren Open-Source-Lösungen darstellen).
Weiterlesen
Manche nennen es Blog, manche Web-Seite - ich schreibe hier hin und wieder über meine Erlebnisse, Rückschläge und Erleuchtungen bei meinen Hobbies.
Wer daran teilhaben und eventuell sogar davon profitieren möchte, muss damit leben, daß ich hin und wieder kleine Ausflüge in Bereiche mache, die nichts mit IT, Administration oder Softwareentwicklung zu tun haben.
Ich wünsche allen Lesern viel Spaß und hin und wieder einen kleinen AHA!-Effekt...
PS: Meine öffentlichen Codeberg-Repositories findet man hier.