Satelliten-Layer
![]()
Ich habe im Zuge der letzten erfolgreichen Mars-Landung ein Thema wiederbelebt, das schon länger auf meiner Platte geschlummert hat:
Die Darstellung von Körpern in einem Geo-Informationssystem, die die Erde umkreisen. Die Darstellung umfasst dabei die senkrechte Projektion des jeweiligen Körpers auf die Erdoberfläche - mit anderen Worten: der Punkt im Geo-Informationssystem stellt den Punkt an der Erdoberfläche dar, an dem der jeweilige Körper im Zenit steht.
Was braucht man dazu: Nun - zunächst einmal Daten darüber, welcher Körper sich bezogen auf die Erde momentan gerade wo befindet. Diese findet man zum Beispiel hier.
Dann etwas, das mit den dort gefundenen Daten in der Lage ist, die Bahnen der jeweiligen Körper zu berechnen und fortzuschreiben. Dazu habe ich predict4java ausgewählt.
Damit ist es möglich, die Bahndaten beliebiger die Erde umkreisender Körper (und auch anderer) zu berechnen. Diese Komponente habe ich dazu benutzt, verschiedene Gruppen von Satelliten in meinem Geo-Informationssystem EBMap4D darzustellen. Das Vorgehen selbst ist natürlich auf beliebige andere Systeme übertragbar.
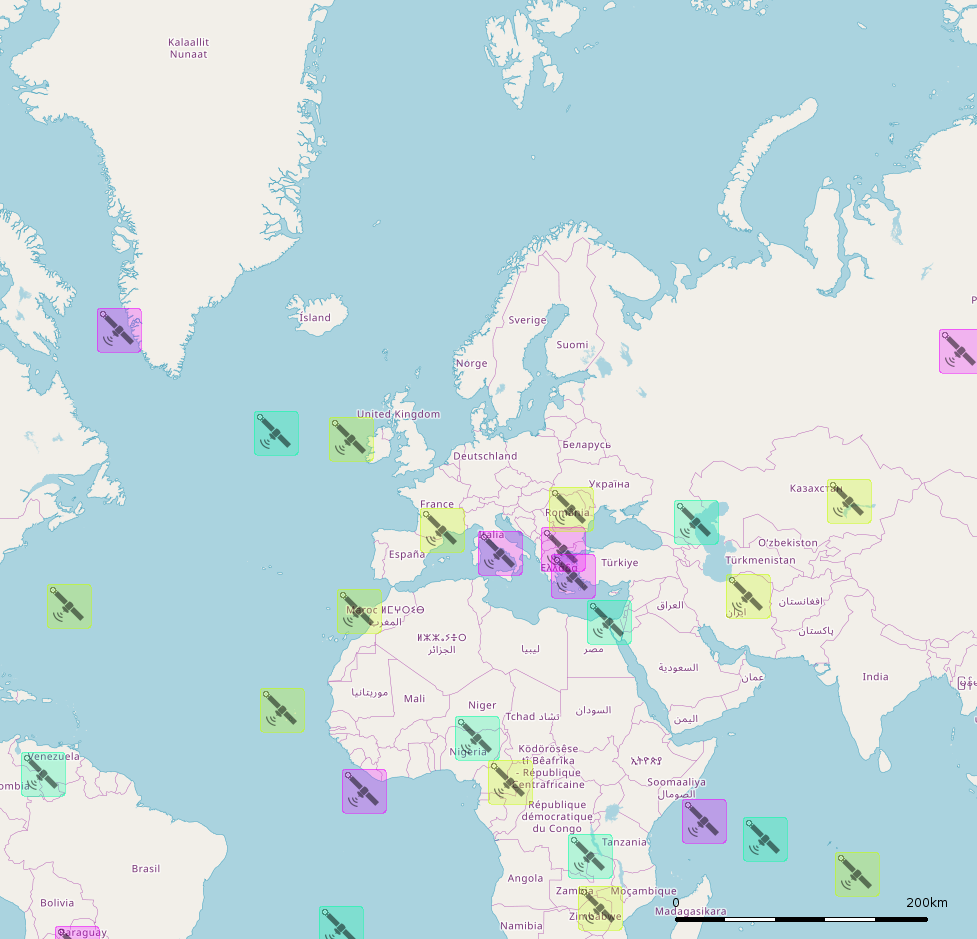
Unten findet man zwei Screenshots - einen, in dem mehrere Satelliten-Layer sichtbar sind: gelb sind hier die Satelliten des GPS-Systems dargestellt, lila die des Systems GLONASS und türkis die des Galileo-Systems.
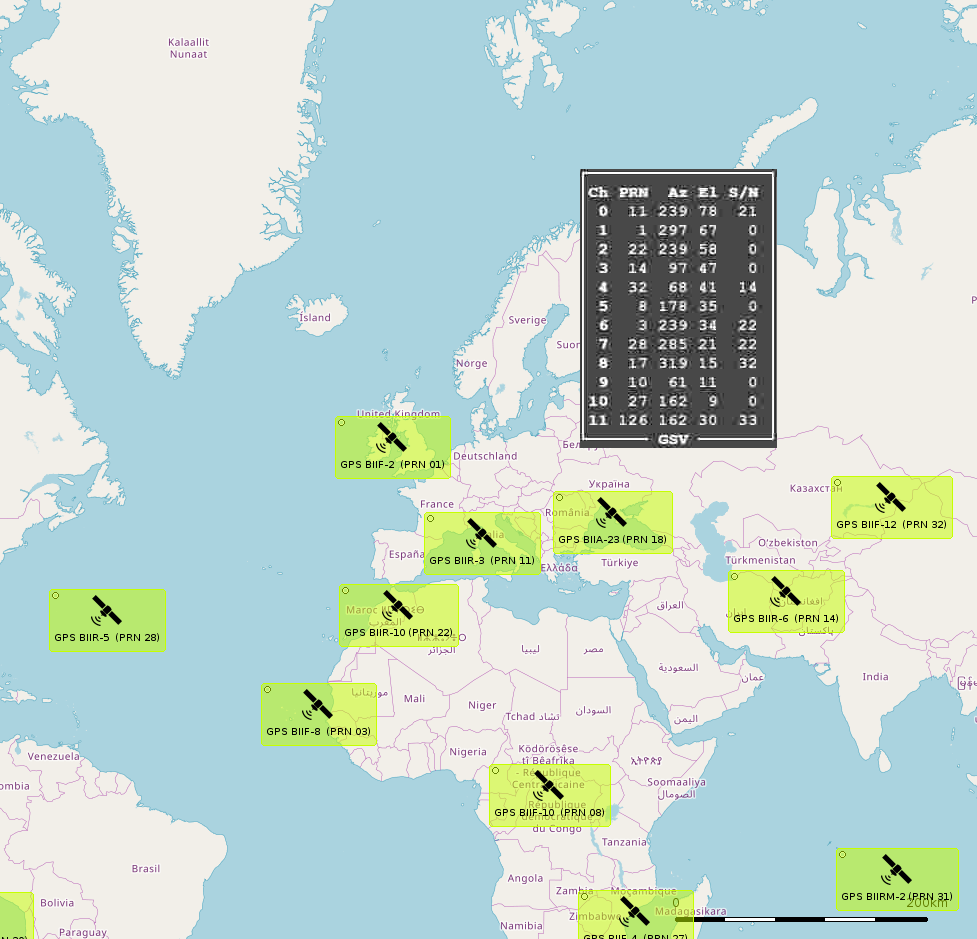
Auf dem zweiten Screenshot sieht man nur die Positionen der GPS-Satelliten und darüber die Informationen eines GPS-Empfängers über die getrackten Satelliten.
Man kann erkennen, dass die Satelliten mit dem höchsten Wert im Feld El(eveation) tatsächlich die sind, die laut Karte Deutschland am nächsten stehen. Eine bemerkenswerte Ausnahme ist die Nummer 18 - eventuell ein Spare oder aus einem anderen Grund inaktiv?




![]()
![]()


![]()
Vor 5 Jahren hier im Blog
-
GeoJSON in EBMap4D
31.07.2021
Ich habe die Anwendung EBMap4D einer Generalüberholung unterzogen und neue Features hinzugefügt...
Weiterlesen
Tags
AI und ML Android Basteln C und C++ Chaos Datenbanken Docker dWb+ ESP Wifi Garten Geo Go GUI Hardware Java Jupyter JupyterBinder Komponenten Links Linux Markdown Markup Music Numerik OpenSource PKI-X.509-CA Präsentationen Python QBrowser Rants Raspi Revisited Security Software-Test sQLshell TeleGrafana Verschiedenes Video Virtualisierung Windows Upcoming...
Neueste Artikel
-
Automatische Konvertierung von JavaScript nach Java
Ich halte mich von den Themen Artificial Intelligence und Machine Learning (Large Language Models) ja fern so gut es geht - vor allem, weil ich das mal studiert habe. Manchmal überkommt mich aber die Neugierde - das Resultat war bisher immer schlechte Laune.
Weiterlesen -
OCR Workflow in der sQLshell
Wie bereits in einem früheren Artikel beschrieben habe verfügt die sQLshell über eine Integration zur Erfassung von Daten aus Dokumentendirekt per Optical Character Recognition. Ich habe diese Integration weiter verfeinert und möchte hier einen exemplarischen Workflow für diese Möglichkeit zeigen
Weiterlesen -
Docker-Services im Homelab
Diese Seite wird mit allen derzeit in meinem Self-Hosting Homelab betriebenen Services auf Docker-Basis befüllt (Eigenentwicklungen werden nicht genannt, sofern sie keine öffentlich verfügbaren Open-Source-Lösungen darstellen).
Weiterlesen
Manche nennen es Blog, manche Web-Seite - ich schreibe hier hin und wieder über meine Erlebnisse, Rückschläge und Erleuchtungen bei meinen Hobbies.
Wer daran teilhaben und eventuell sogar davon profitieren möchte, muss damit leben, daß ich hin und wieder kleine Ausflüge in Bereiche mache, die nichts mit IT, Administration oder Softwareentwicklung zu tun haben.
Ich wünsche allen Lesern viel Spaß und hin und wieder einen kleinen AHA!-Effekt...
PS: Meine öffentlichen Codeberg-Repositories findet man hier.